Le marché du drone est en mutation permanente. Ce qui était il y a encore 5 ans de simple multirotor radio commandé se sont peut à peut transformé en véritable drone autonome grâce à la combinaison du GPS et de nombreux capteurs. Ces avancées technologiques ont permis d’introduire des fonctions comme le RTH (return to home: le drone retourne à son point de décollage tout seul) ou encore la navigation par waypoint (le drone se rend aux coordonnées GPS pré-enregistrées). Seul ombre au tableau, tout ce fait en ligne droite et gare à ne pas rencontrer d’obstacles sous peine de pulvériser votre drone. Mais la bataille fait rage en 2016 pour améliorer encore les drones et les doter d’une fonction d’évitement d’obstacles. Ainsi au CES, toutes les marques ont dévoilés des concepts comme DJI avec son Phantom X, Go Pro avec son Karma ou carrément des modèles fonctionnels tel que le Typhoon H de Yuneec équipé de la techno Intel RealSense. Parrot ne pouvait pas se permettre de se laisser distancer le terrain des fonctions « avoid obstacles ». Alors en attendant d’avoir un modèle commercial type AR Drone 4 / Bebop 3 embarquant la technologie, Parrot occupe le terrain en dévoilant un kit de développement nommé Parrot S.L.A.M.Dunk qui peut être monté sur un Bebop 2.
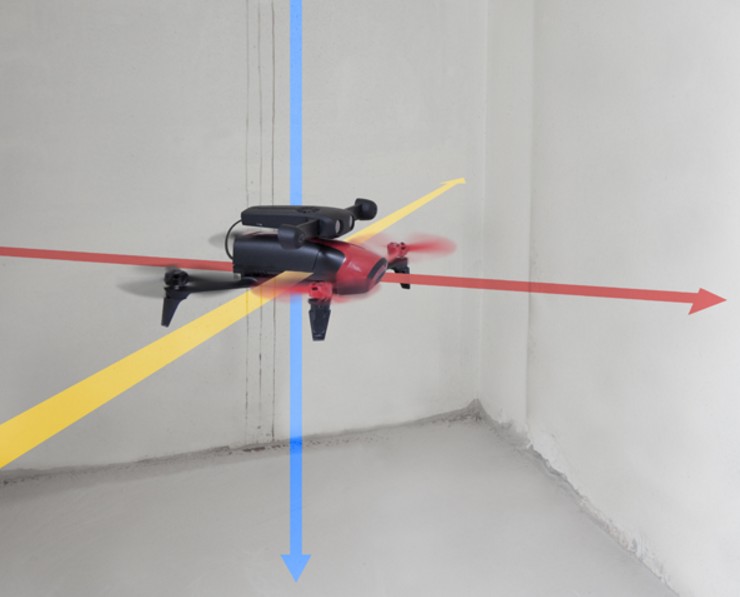
Comme à l’accoutumé chez le constructeur français, le matériel et le logiciel sont étroitement liés et ce kit ne fait pas exceptions puisqu’il combine une palanquée de capteurs électroniques et d’algorithmes logiciels, conçu pour aider les développeurs à accélérer la création d’applications de navigation avancées pour des drones et plateformes robotiques. Comme l’indique le nom du kit: SLAM (Simultaneous Localization And Mapping / Cartographie et localisation simultanées) embarque tout le nécessaire pour se localiser dans un univers modélisé en 3D et fournir une fonction d’évitement d’obstacles.
Pour arriver à faire tous les calculs en temps réel en embarqué, le kit est animé par le puissant processeur NVIDIA Tegra K1 ARM (Cortex A15 quad core avec 192 GPU à 2,2 Ghz… autrement plus véloce que le vieux Parrot P7 qui équipe les Bebop (CPU ARM double-coeur Cortex 9). Le CPU est épaulé par 2Gb de mémoire DDR3 et de 16Go de stockage. Côté connectique, on retrouve:
- USB: USB 2.0 OTG, USB 3.0 Host
- Vidéo: une sortie HDMI
- Développeur: SPI, I²C, UART, FSYNC caméra trigger, 2 GPIO
- Wifi en option (nécessite l’ajout d’un dongle)
Comme le montre l’image ci-dessous, il y a de nombreux capteurs embarqués:
- Centrale Inertielle
- Ultrasons (Range: 20 m)
- Baromètre
- Magnétomètre
Et bien sur deux caméras pour de l’acquisitiond ‘image stéréoscopique:
- 2 caméras grand angle haute résolution.
- Modes de vidéo: 1500 x 1500 60 FPS – 900 x 700 120 FPS
- 200° FOV
- Distance inter-caméra : 20 cm
Côté logiciel on retrouve un OS basé sur Ubuntu ainsi qu’un sdk ROS.
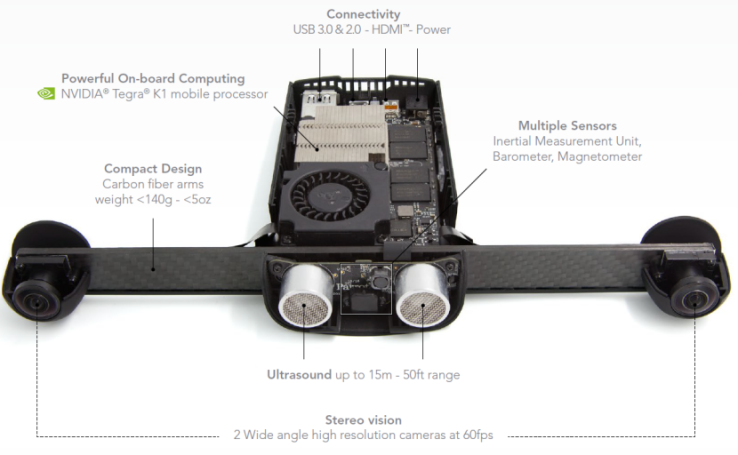
Le kit pèse seulement 136 gr avec ses bras en fibre de carbone ce qui permet de l’intégrer facilement dans les quadri-rotors, les ailes volantes tel que le Parrot Disco ou même les robots terrestres.
Si vous souhaitez l’acheter sachez qu’il coutera la bagatelle de 1249€
Poster un Commentaire