Dans les années à venir, les robots seront de plus en plus présent dans le milieu médical pour preuve certains sont déjà en service comme l’HOSPi qui transporte dossiers et médicaments dans les chambres des patients, le RP-7 qui autorise la télé-médécine en faisant un diagnostique à distance ou encore les robots civières. Outre ces robots, il faudra également compter sur des humanoides assurant le rôle d’aide soigant ou de nounou tel que le RIBA (Robot for Interactive Body Assistance).
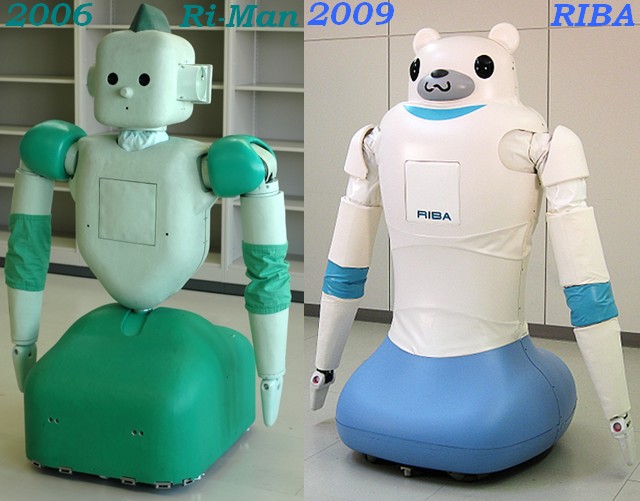
Le R.I.BA a été développé conjointement par les chercheurs du Japan’s Institute of Physical and Chemical Research (RIKEN) et Tokai Rubber Industries, Ltd. (TRI). Ce robot est une mise à jour du RI-MAN datant de 2006 dont j’avais déjà parlé dans cet article. Le RIBA a été conçu dans le but d’assister les handicapés moteurs. Il est par exemple capable de soulever une personne pour la transférer d’un lit à un fauteuil roulant ou encore déposer quelqu’un sur des toilettes. Alors que l’ancien modèle ne pouvait soulever un corps ne pesant pas plus de 18,5 kg, le nouveau peut emporter jusqu’à 61 Kg. Le RIBA pèse pret de 180 kilo et se montre 15 fois plus rapide que son prédécesseur. Les bras et les mains sont équipés de capteurs sensitif de manière à mieu sentir la charge et ainsi mieu la répartir. Pour le confort du patient, la surface des bras et mains ont été recouvertes d’une mousse d’uréthane légère, formant une peau douce.
Le RIBA est capable d’effectuer une reconnaissance des visages et des voix. Il peut également répondre à un ordre vocal. Le robot est aussi mesure d’évoluer sans danger dans le même espace que celui des hommes en se répérant dans l’environnement grâce à des informations sonore et visuelle. Le RIBA devait être mise en service dans les 5 années à venir.
A l’image du robot BEAR, le RIBA prend les traits d’un gros nounours pour le côté rassurant au pret des patients.
Poster un Commentaire