Lorsque vous débuter la construction d’un multicoptère à propulsion électrique, il y a de nombreux composants à choisir et l’un des principaux est la carte contrôleur de vol souvent désigné sur les forums spécialisés sous le nom de FC pour Flight Controller (ou encore Flying Card).
La FC est en quelque sorte la carte “mère”, elle embarque l’électronique et le processeur nécessaire au contrôle des entrées (commande radio), et les sorties qui vont contrôler la partie puissance: variateur des moteurs brushless ou encore les servomoteurs. La flying card fait également office de centrale inertielle grâce à ses capteurs embarqués. Généralement par défaut on trouve sur la carte des accéléromètres et gyroscopes qui permettent de calculer en temps réel les angles d’attitude (roulis, tangage, cap), le vecteur vitesse, ainsi que la position 3D instantanée à partir des mesures de ses capteurs. Cet ensemble permet de maintenir ou rétablir l’assiette du multicoptère, ce qui apporte une grande assistance au pilotage. En ajoutant des capteurs tel que: GPS, télémètre , sonar, baromètre, boussole, il devient possible de faire un drone évoluant de manière autonome.
Vous trouverez ci-dessous la liste des principales FC présente sur le marché. Certaine sont dite Plug & Fly, vous branchez et c’est prêt à voler sans effectuer de configuration compliqué. D’autres sont évolutives et permettent d’améliorer votre machine en faisant des ajouts hardware (capteurs) et des upgrades de firmware. D’autres sont réservés aux bricoleurs savant magner le fer à souder et ayant du temps et des compétences pour configurer la partie software.
Une solution clef en main peut atteindre plusieurs milliers d’euros tandis qu’un Do It Yourself (DiY) vous en coutera seulement quelques dizaines.
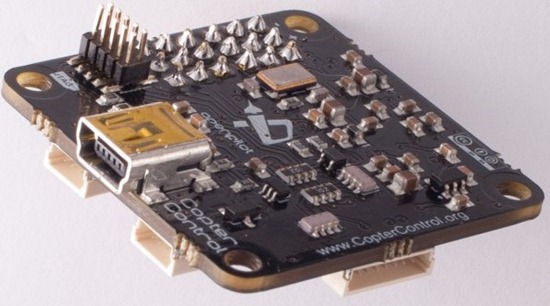
Open Pilot – Copter Control 3D (CC3D) Commercialisé à partir de fin octobre 2012 à 101€)
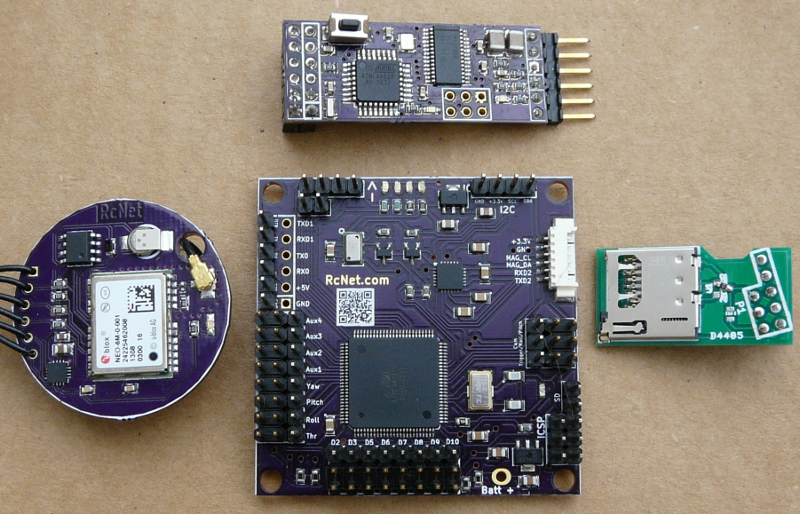
La carte RcNet: la partie logiciel est sous licence GPL V3. Son firmawarel est basé sur la version 2.2 de multiwii et a été optimisé pour que son fonctionnement soit optimal et le plus simple possible sur la RCNet. FC avec l’amélioration du RTH (return to home), ajout de l’atterrissage automatique au RTH et du désarmement moteur automatique et du RTHA avec le failsafe. Plus de détails ici.

DJI NAZA (220€) et 370€ pour la version avec GPS et fonction RTH

Mikrokopter MK: NaviCtrl 2.0 (200€)

Rabbit Flight Controller

AfroFlight32 / Naze 32 (55€): tous les détails sur cette page

Free Flight FF


Hoverflytech – HoverflyPRO (450$), on retrouve des quadricoptères équipés de cette carte sur robotshop.com tout monté à 8500$

Ardupilot Mega

Flyduino MEGA Flight Controller

Hobby King : HK KK

MultiWii
Il s’agit d’un projet Open Source dont le français Alex in Paris est à l’origine.
Si le nom de cette carte sonne comme celui de la console de Nintendo ce n’est pas un hasard.
En effet à l’origine c’était les capteurs contenu dans les manettes Wii Motion Plus et Wii Nunchuk qui était démontés pour être associé à une plateforme Arduino.
Aujourd’hui d’autres capteurs sont gérés comme le GPS. Plus d’infos sur le Site Officiel ou le Wiki FR.

FY-90Q

Bumblebee

APM 2.0

GAUI GU 344

Next Generation Multicopter – NG UAVP

Drotek IMU 10DOF – ITG3200 + BMA180 + HMC5883 + BMP085
QUADRINO – Ready-to-Fly Flight Controller – Arduino Compatible with 10-DOF IM
FlyWii32 qui fait tourner MWC-ng, un fork du projet MultiWii
thequadshot: Lisa/M v2.0 et Aspirin IMU V2.1 9DOM
The Paparazzi Project: est un projet gratuit et open source (software + hardware) pour créer un système d’auto pilote
Il est où le comparatif ?
Il n’y a qu’une liste de carte FC avec si peu de commentaire.
Il faut lire les articles en lien pour chaque carte (c’est vrai que toutes n’ont pas le même niveau de détails)
Par exemples pour la naze 32 ou les CC Open Pilot, il y a plusieurs pages 😉
http://www.geekmag.fr/naze-32-test-et-configuration-de-la-fc-abusemark/
Faute de temps, je n’ai pu compléter pour le moment mais c’est un bon point de départ pour savoir ce qui se fait et chercher des info sur le net! 😉
magnifique synthese.
grand merci